Mesh exchange example
If you struggle with which mesh you should use where in the configuration and whether a mapping is read or write, you might find this example helpful.
People that are new to preCICE typically struggle with the same things in the configuration:
- What does it mean that a mapping is a “write” mapping?
- Which mesh should be received “from” another participant?
- Which mesh should be mentioned in the
exchangetag?
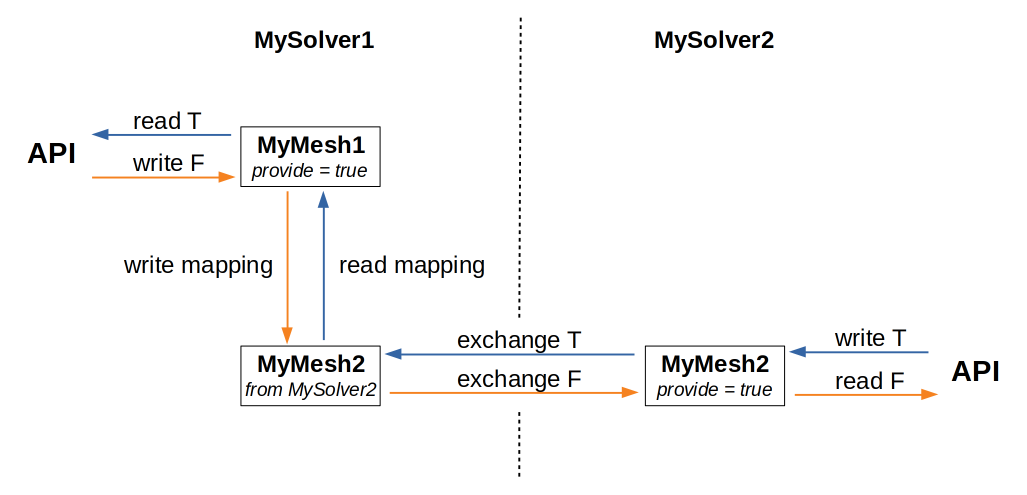
Example configuration
All this sounds complicated at first, but is relatively clear once you draw the right picture. Let’s do this here exemplary for the following configuration file:
...
<participant name="MySolver1">
<provide-mesh name="MyMesh1"/>
<receive-mesh name="MyMesh2" from="MySolver2"/>
<read-data name="Temperature" mesh="MyMesh1"/>
<write-data name="Forces" mesh="MyMesh1"/>
<mapping:nearest-neighbor direction="read" from="MyMesh2" to="MyMesh1" constraint="consistent"/>
<mapping:nearest-neighbor direction="write" from="MyMesh1" to="MyMesh2" constraint="conservative"/>
...
</participant>
<participant name="MySolver2">
<provide-mesh name="MyMesh2"/>
<read-data name="Forces" mesh="MyMesh2"/>
<write-data name="Temperature" mesh="MyMesh2"/>
...
</participant>
<coupling-scheme:serial-explicit>
<participants first="MySolver1" second="MySolver2"/>
<exchange data="Forces" mesh="MyMesh2" from="MySolver1" to="MySolver2"/>
<exchange data="Temperature" mesh="MyMesh2" from="MySolver2" to="MySolver1"/>
...
</coupling-scheme:serial-explicit>
Why do we make all this so complicated?
We want to give the user as much freedom as possible to adjust the setup to her specific needs. Typical constraints / wishes are:
- Communication of coupling data on the coarser mesh
- Computation of the quasi-Newton acceleration on the coarser mesh (typically more robust)
- Restriction of the mapping in parallel to “read-consistent” and “write-conservative” (more information on the mapping configuration page